Section 1.5 Position Vectors
Subsubsection Key Ideas
Definition 1.5.2. Position.
The position of an object, represented with the symbol \(\vec{r}\text{,}\) describes the location of that object relative to some origin as a vector quantity.
A position vector is always measured relative to some origin (a fixed location in space) and using some set of coordinates. In general, position is three-dimensional, but many positions can be described using only two dimensions. Various letters can be used for position, including the generic \(\vec{r}\) used above and the standard Cartesian letters \(\vec{x}\text{,}\) \(\vec{y}\text{,}\) and \(\vec{z}\text{.}\)
Definition 1.5.3. Coordinate System.
A coordinate system specifies an origin and a set of axes for the purpose of measuring and describing position vectors.
Note 1.5.5. Non-Standard Coordinates.
You may be familiar with Cartesian coordinates already: \(x\) along the horizontal axis and \(y\) along the vertical axis (plus \(z\) if you need it!). Importantly, Cartesian coordinates are arbitrary, and physics often invokes other coordinates when convenient. This may mean rotating the Cartesian coordinates so they are tilted, using different coordinates for different objects in the same context, or even using non-Cartesian coordinates such as circular (polar) coordinates.
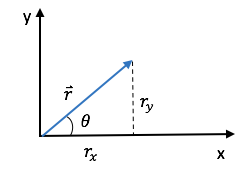
As with any vector, position can be written either by giving a magnitude and a direction, or by writing it in terms of components using unit vectors:
\begin{equation*}
\vec{r}= r_x\hat{x} + r_y \hat{y}
\end{equation*}
A graphical representation of such a vector is shown below.
Definition 1.5.6. Unit Vectors.
Symbols like \(\hat{x}\) and \(\hat{y}\) are special vectors called unit vectors or basis vectors. A unit vector has the following properties:
-
A unit vector has a magnitude of 1
-
A unit vector has no dimensions: the magnitude is 1, not 1 meter or 1 second
-
A unit vector always points in the direction along which the given variable is increasing: for example, \(\hat{x}\) points in the direction of increasing \(x\)
-
A unit vector is written with a “hat” symbol instead of an “arrow” symbol.
-
You can turn any vector into a unit vector by dividing it by its own magnitude: for example, \(\hat{v} = \frac{\vec{v}}{|\vec{v}|}\)
Some authors, textbooks, and resources will use \(\hat{i}\) and \(\hat{j}\text{,}\) respectively, instead of \(\hat{x}\) and \(\hat{y}\text{,}\) but they mean the same thing. You can learn more in Unit Vectors.
Key Skill 1.5.8. Breaking a Vector into Components.
One of the most important skills to master in physics is breaking a vector into components.
Sketch a right triangle, like the one in the figure above, in which the \(x\)- and \(y\)-components form the legs and the vector itself forms the hypotenuse. In the equation \(\vec{r} = r_x \hat{x} + r_y\hat{y}\text{,}\) the scalar values \(r_x\) and \(r_y\) are called the components of \(\vec{r}\text{.}\)
An equally valuable skill is being able to start from the components of a vector and determine the magnitude and direction. In the figure above, for example, the magnitude is \(|\vec{r}| = r = \sqrt{r_x^2 + r_y^2}\) and the angle is given by \(\tan{\theta} = \frac{r_y}{r_x}\text{.}\)
Example 1.5.9. Vector Decomposition.
Subsubsection Activities
Calculation 1.5.1. Finding Position Components.
Use what you know about triangles and vector components to write equations relating \(r_x\) and \(r_y\) to \(r\) (the magnitude of \(\vec{r}\)) and \(\theta\) in the figure above. How would the answer differ if you want to write the components in terms of the other angle in the triangle?
Answer.
\begin{equation*}
r_x = r\cos\theta
\end{equation*}
\begin{equation*}
r_y = r\sin\theta
\end{equation*}
Let the other angle in the triangle be called \(\alpha\text{.}\) Since \(\alpha\) is the complementary angle to \(\theta\) (the two angles add up to \(90^o\)), the adjacent and opposite sides of the triangle have been reversed, and thus the corresponding trig functions will be reversed.
\begin{equation*}
r_x = r\sin\alpha
\end{equation*}
\begin{equation*}
r_y = r\cos\alpha
\end{equation*}
Activity 1.5.2. State Vectors.
Choose a different state (or country) than Oregon and find a simple map. Mark a few of the major cities or landmarks on the map (at least three).
-
Choose a coordinate system and an origin and mark them on your map.
-
Draw position vectors for each of the locations you marked on your map.
-
Write each position vector in rectangular form like \(\vec{r} = r_x\hat{x} + r_y\hat{y}\text{.}\)
-
Look up any appropriate numbers to find a numerical position vector for each point.
References References
[1]
Vector Decomposition into components by Dr. Michelle Tomasik from MIT 8.01 Classical Mechanics, Fall 2016, used under Creative Commons BY-NC-SA.
