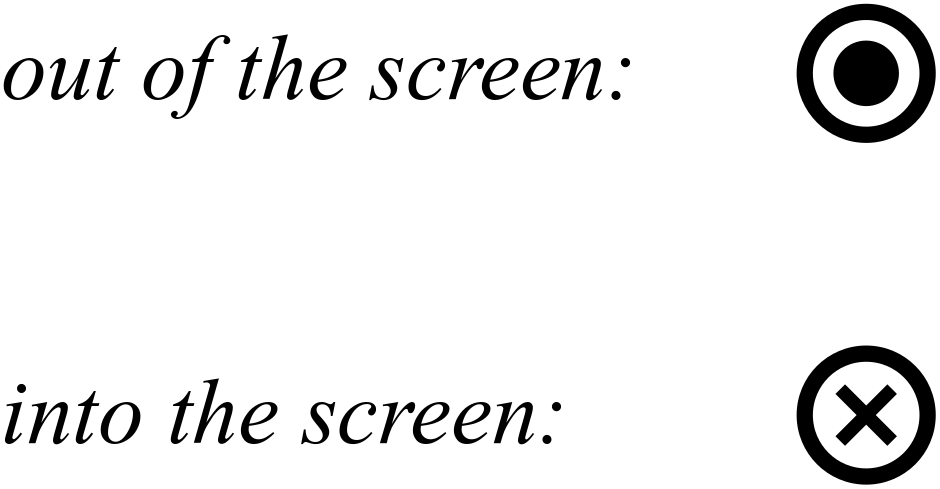
Section 12.2 The Cross Product
Subsubsection Key Ideas
In a previous section you learned about the dot product as one way to multiply vectors. Another way to multiply vectors is the cross product, named because you will use \(\times\) to represent the multiplication. Unlike the dot product, the cross product of two vectors is a vector, not a scalar.
Definition 12.2.2. The Cross Product.
The magnitude of the cross product between two vectors is given by \(|\vec{A} \times \vec{B}| = AB \sin\theta\text{,}\) where \(\theta\) is the angle between the vectors when placed tail-to-tail. The direction is always perpendicular to both \(\vec{A}\) and \(\vec{B}\text{,}\) and is given by the Right Hand Rule.

In the figure, \(\theta\) represents the angle between the two vectors when they are placed tail to tail. \(A\) and \(B\) represent the magnitudes of the vectors \(\vec{A}\) and \(\vec{B}\text{.}\)
The direction of the cross product must be perpendicular to both of the original vectors. However, there are always two directions perpendicular to any other pair of vectors! The Right Hand Rule is the convention by which you always choose which of these two directions the cross product should point.
Video Lesson 12.2.4. The Right Hand Rule.
Representation 12.2.5. Right Hand Rule.
The direction of the vector \(\vec{C}\) that results from the cross product \(\vec{C} = \vec{A} \times \vec{B}\) can be determined using the right hand rule. To use the right hand rule, place your fingers in the direction of \(\vec{A}\text{,}\) curl them in the direction of vector \(\vec{B}\text{,}\) and your thumb will point in the direction of vector \(\vec{C}\text{.}\)

Note 12.2.7. What does the cross product mean?
Conceptually, the magnitude of the cross product quantifies how perpendicular two vectors are. The magnitude of the cross product is the magnitude of \(\vec{B}\) multiplied by the perpendicular projection of \(\vec{A}\) onto \(\vec{B}\text{.}\) You can think of a projection as the length of the shadow that \(\vec{A}\) would cast perpendicular to \(\vec{B}\) if you were to shine a light from above.
Subsubsection Practice Activities
Activity 12.2.1.
Indicate the direction of the cross product of the two vectors in Figure 12.2.3, \(\vec{A} \times \vec{B}\text{.}\)
Activity 12.2.2.
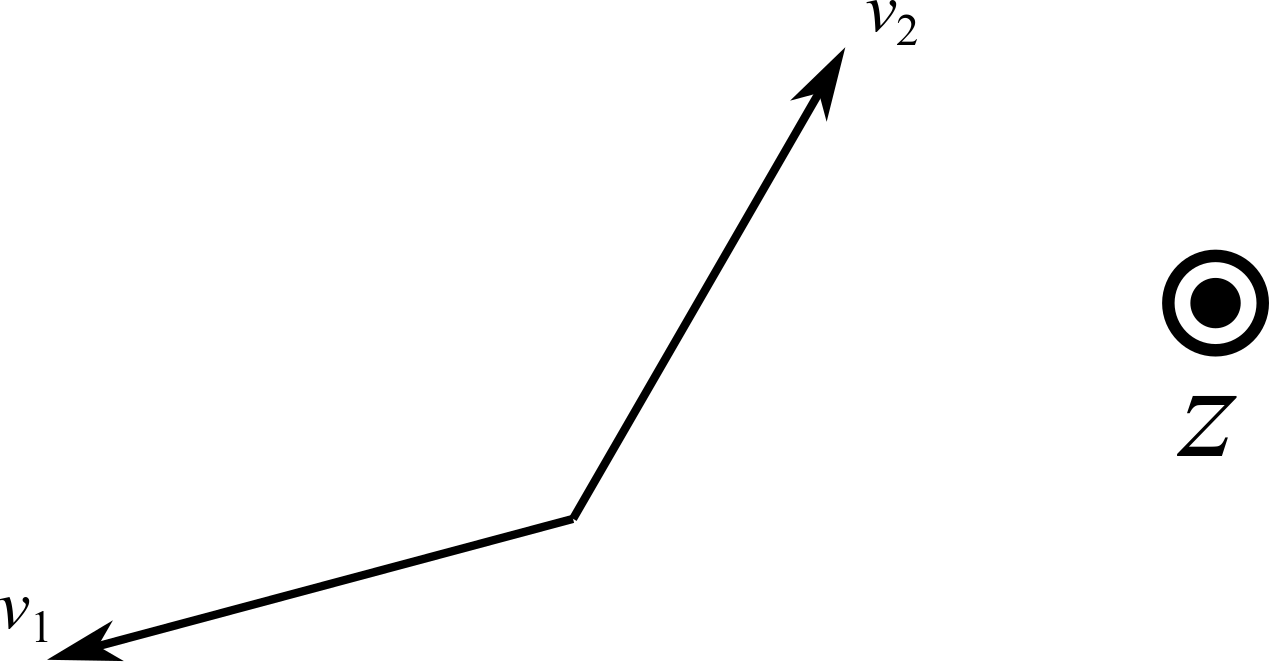
(a)
Indicate the direction of the cross product \(\vec{v}_1 \times \vec{v}_2\text{.}\)
(b)
Label the appropriate angle \(\theta\) and estimate its value. Use your estimate and the value \(a = 15\) for the magnitude of both vectors to estimate the magnitude of \(\vec{v}_1 \times \vec{v}_2\text{.}\)
